ทิศตะวันตก
ทิศตะวันตก



















{kind=link}
จะมีคำสั่งหลักๆที่สำหรับใช้ตรวจสอบระบบInternet สามารถใช้ได้ที่บ้านหรือในระดับองค์กร
ซึ่งจะต้องใช้ผ่าน Command Prompt หรือ เรียกสั้นๆว่า cmd จะมีวิธีเข้าคำสั่งได้ดังนี้
Windows 7
กดปุ่ม Windows+r จะปรากฎหน้าต่าง run ขึ้นมาให้พิมพ์ cmd ลงในช่องแล้วกดEnter

กดปุ่ม start พิมพ์คำว่า cmd ลงในช่อง search แล้วกดEnter

Windows8.1
– กดปุ่ม Windows+x จะปรากฎแถบขึ้นมาทางล่างซ้าย ใช้เมาส์คลิกเลือก Command Prompt หรือ Command Prompt (Admin)

เมื่อหน้าต่างCommand Promptขึ้นมาแล้วที่นี้ก็จะมาใส่คำสั่งสำหรับตรวจสอบ
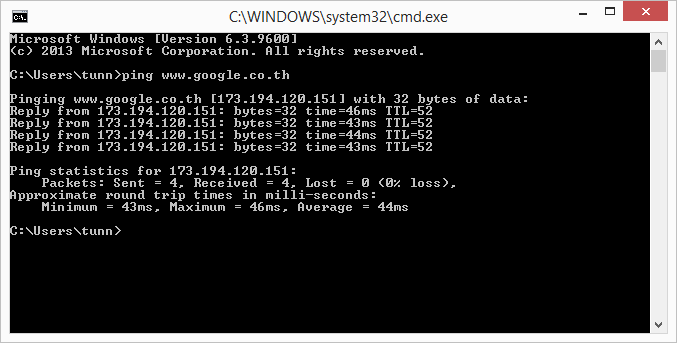
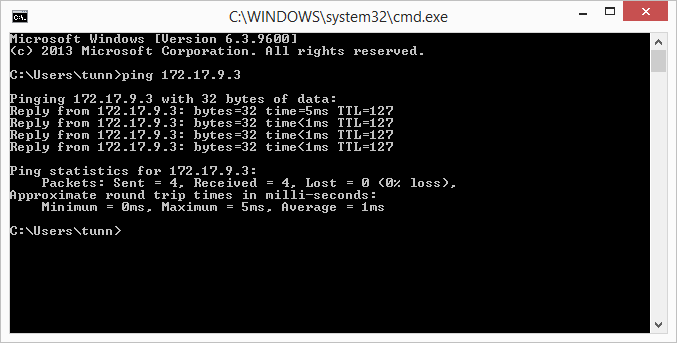
1.คำสั่ง ping เป็นการทดสอบว่าเส้นทางสื่อสารจากเครื่องที่ใช้อยู่ไปยังเครื่องคอมพิวเตอร์เครื่องอื่นในเครือข่าย ว่ามีการใช้งานอยู่หรือไม่ หรือทดสอบเว็บไซด์ว่าสามารถเข้าได้หรือไม่ โดยการพิมพ์ชื่อเครื่อง หรือ IP Address หรือชื่อเว็บไซด์ที่ต้องการตรวจสอบ
แบบของคำสั่ง เช่น
ping www.google.co.th
ping 192.168.0.0
2รูปนี้เป้นการทดสอบว่าสามารถติดต่อสื่อสารได้
รูปนี้ไม่สามารถติดต่อสื่อสารหากันได้

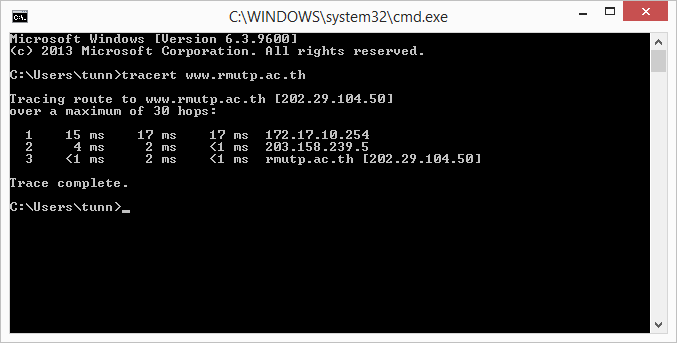
2. คำสั่ง tracert จะคล้ายpingแต่จะสามารถแสดงเส้นทางว่าผ่านไปที่ใดบ้างตั้งแต่ต้นจนถึงปลายทาง เมื่อเกิดเหตุขัดข้องจะรู้ได้ว่า จุดที่ขัดข้องอยู่ตรงไหน กรณีที่ขึ้นเครื่องหมาย * แสดงว่าเส้นทางนั้นขาดหรือขัดข้อง เมื่อเสร็จสิ้นจะขึ้นคำว่า trace complete
แบบของคำสั่ง จะเป็นในรูปแบบชื่อเว็บหรือเลขไอพีก็ได้
tracert www.google.co.th
tracert 192.168.0.0
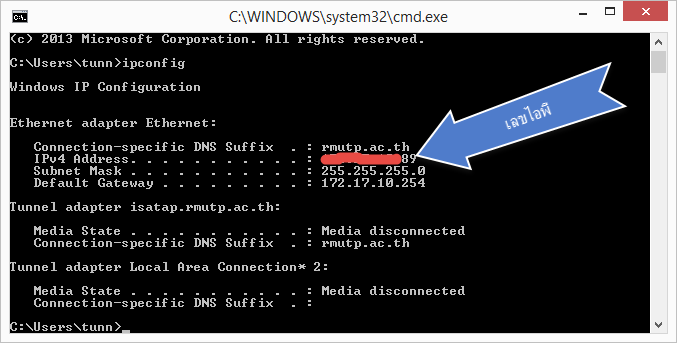
3.คำสั่ง ipconfig จะแสดงรายละเอียดของหมายเลขไอพีเครื่องที่ใช้งานอยู่ รายละเอียดการ์ดแลน
แบบของคำสั่ง ipconfig (ถ้ามี option เพิ่มก็จะมีรูปแบบนี้ ipconfig /xxx )
นอกจากนี้ยังมี option คำสั่งเพิ่มเติมที่นิยมใช้ร่วมกับคำสั่ง ipconfigได้แก่
/? แสดง help ของคำสั่งนี้
/all แสดงรายละเอียดทั้งหมด
/release ยกเลิกหมายเลข IP ปัจจุบัน
/renew ขอหมายเลข IP ใหม่ ในกรณีที่เน็ตเวิร์คมีปัญหา เราอาจจะลองตรวจสอบได้โดยการใช้คำสั่งนี้ ซึ่งหากคำสั่งนี้ทำงานได้สำเร็จ แสดงว่าปัญหาไม่ได้มาจากระบบเครือข่าย แต่อาจจะเกิดจากซอฟท์แวร์ของเรา
4. คำสั่ง netstat เป็นการตรวจสอบการเชื่อมต่อจากที่ต่างๆออกมาทั้งหมดไม่ว่าจะมา จาก protocol TCP, UDP, ICMP และอื่นๆ รวมไปถึงหมายเลข Port และ IP ของผู้ติดต่อมาที่เครื่องของเราด้วย
แบบของคำสั่ง netstat

ค่าที่แสดงออกมาในการตรวจสอบ มีความหมายดังนี้
- Proto คือ Protocol ที่กำลังใช้งานอยู่จะมี TCP และ UDP เป็นหลัก
- Local Address (ค่า IP หรือชื่อเครื่อง: port ที่ใช้งานอยู่) คือจะแสดง หมายเลข IP ของเรา (ในที่นี้เป็นชื่อเครื่อง) และ port ที่ืั้กำลังใช้งานอยู่
- Foreign Address (ค่า IP หรือชื่อเครื่อง: Port ที่ใช้ติดต่ออยู่): อันนี้จะแสดงชื่อหรือ IP addressของเครื่องที่เรากำลังติดต่ออยู่ด้วย และหมายเลข Port ที่เราใช้เชื่อมต่อนั้นๆState คือ สถานะของการเชื่อมต่อของ netstat นั้นๆจะมีอยู่ด้วยกัน 4 สถานะหลักๆได้แก่
Established เป็นสถานะที่บอกว่าเครื่องนั้นๆได้เกิดการเชื่อมต่อกับ IP address ปลายทางด้วย port หมายเลขนั้นแล้ว ซึ่งสถานะนี้เป็นสถานะที่เกิดได้ทั่วไปเพราะการเชื่อมต่อใน internet นั้นเป็นเรื่องที่ธรรมดาอยู่แล้ว แต่ถึงอย่างไรก็ตามเราควรตรวจสอบให้ดีเพราะมีบาง port ที่ไม่จำเป็นก็ไม่ควรจะมีการเชื่อมต่ออยู่ เช่น port 23 ซึ่งเป็น port ของ telnet ซึ่งโดยทั่วไปแล้วนั้นไม่มีใครใช้กันสักเท่าไรและที่สำคัญอีกอย่างสำหรับสถานะ Established ก็คือควรตรวจสอบก่อนว่าเราไม่ได้ connect ไปหาIP address แปลกๆเข้าให้เพราะว่าบางที่นั้นอาจเป็นเพราะว่าในเครื่องของเราลักลอบติดต่อไปด้วยโปรแกรมอันตรายอย่าง Trojan อยู่ก็เป็นไปได้
Time_wait คือสถานะที่รอการเชื่อมต่อกลับมาอยู่หรือถ้าเราจะมองในแง่ร้ายสุดๆ ก็คือโดน scan port อยู่
Listening คือยังไม่มีเครื่องใดติดต่อมาหรือว่ากำลังรอการเชื่อมต่ออยู่นั้นเอง
Close_wait คือปิดการเชื่อมต่อปกติจะไม่พบมากสำหรับสถานะนี้และสถานะอื่นๆที่อาจพบได้แก่ SYN_SENT , FIN_WAIT เป็นต้น
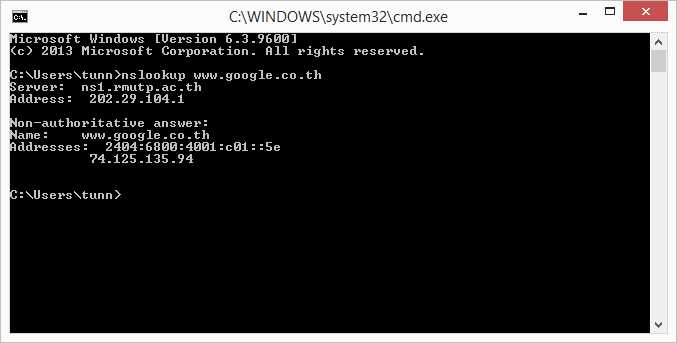
5. คำสั่ง nslookup เป็นการตรวจสอบ ว่าหมายเลข IP Address อันนี้เป็นของเว็บไซต์อะไร หรือว่าสามารถใช้ในทางกลับกันว่า เว็บไซต์นี้มีหมายเลข IP Address อะไร
แบบของคำสัง